Navigating deep sand dunes is a major challenge for Mars exploration. Consequently, getting stuck can end a mission entirely.
To solve this, a breakthrough project within our VaMEx initiative looked directly at nature. A research team from the Universities of Würzburg and Bremen developed a novel Mars rover. Interestingly, its wheels do not just roll. Instead, they actively “swim” through the ground.
The team chose the sandfish (Scincus scincus) as their biological blueprint. This Sahara desert lizard effortlessly glides through loose sand without getting trapped.
In the Spotlight: Heise and c’t Report on VaMEx Technology
Because of this success, Germany’s leading tech media outlets are currently highlighting our network’s work:
- Heise online explains how these biomimetic wheels solve the slipping problem. Furthermore, the wheels mimic the lizard’s wave-like motions to generate traction instead of burying the vehicle.
- c’t, Europe’s largest computer magazine, dives deep into the complex algorithms. Specifically, advanced embedded sensor systems calculate slippage in milliseconds. Therefore, the rover adjusts its locomotion dynamically.
Why This Matters for VaMEx
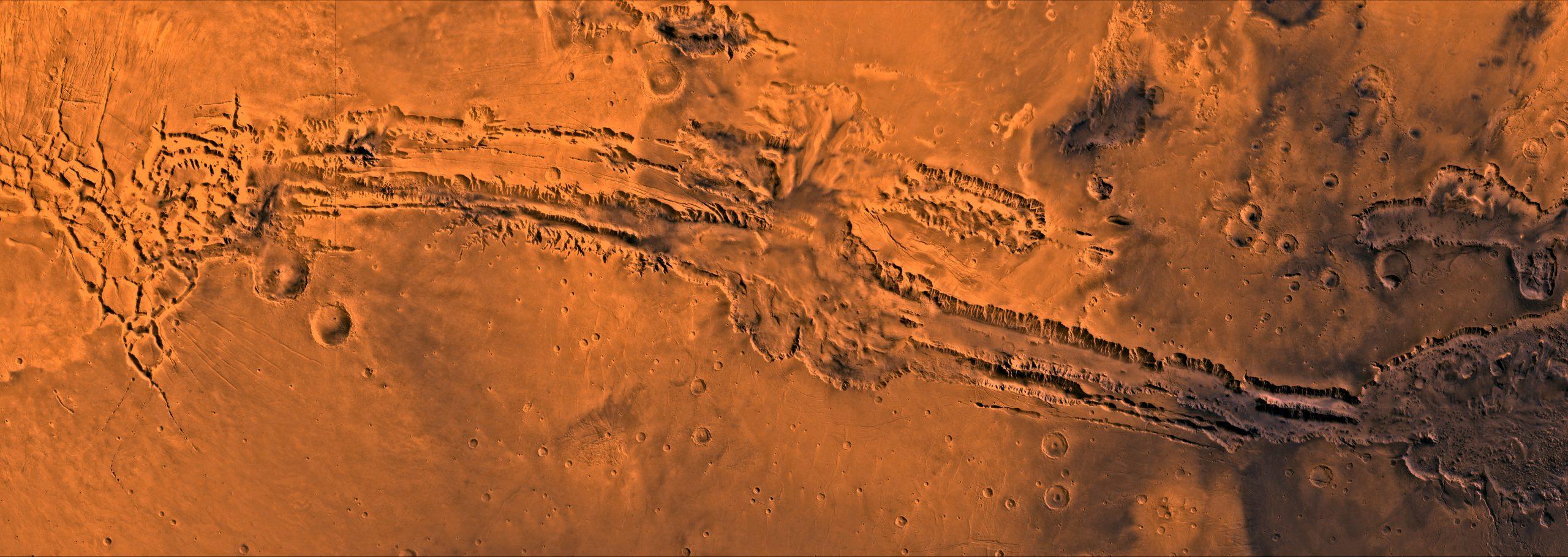
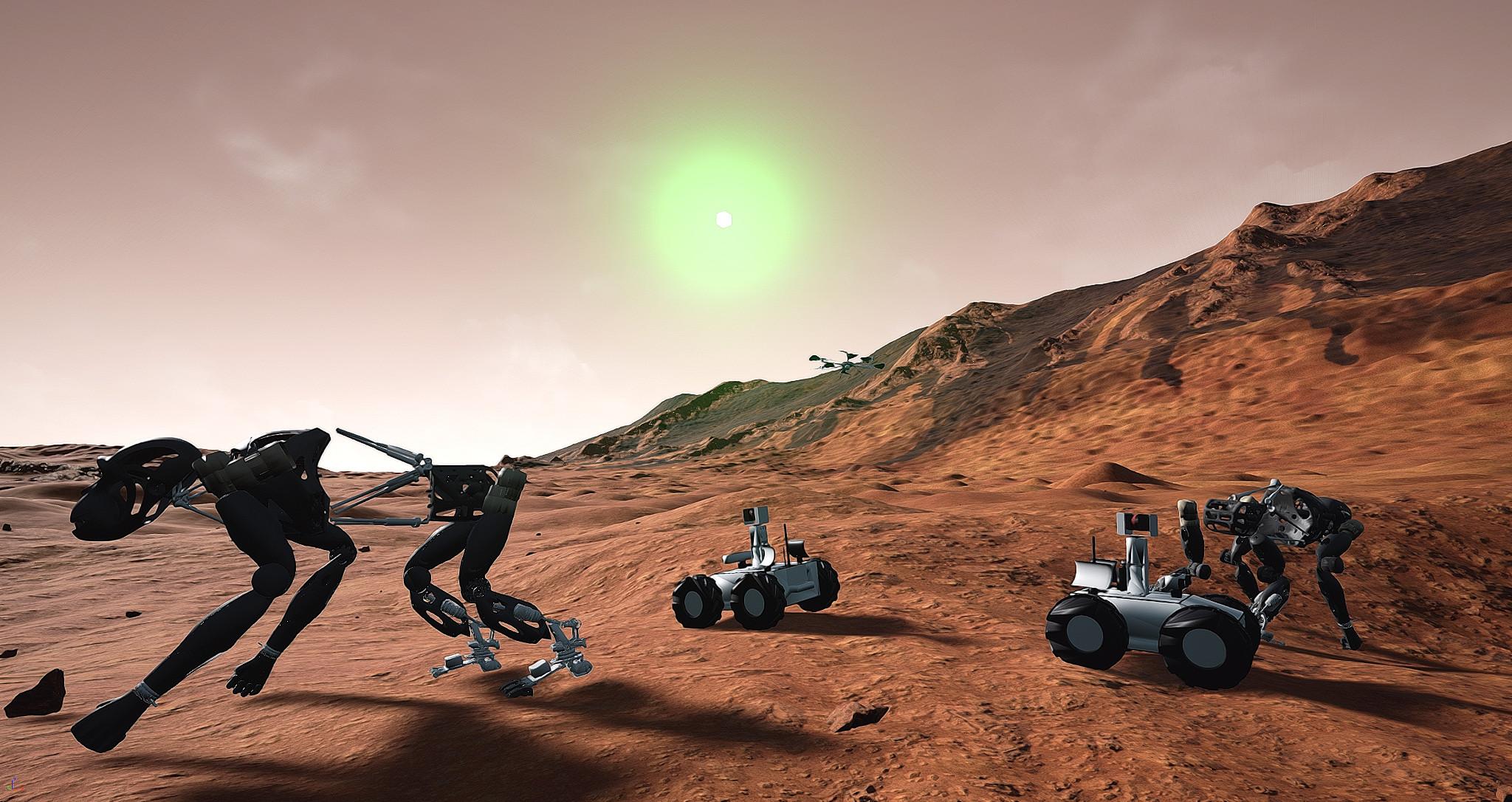
Ultimately, the VaMEx initiative aims to deploy a cooperative swarm of autonomous drones and rovers. These machines must explore the rugged Valles Marineris canyon. As a result, a rover that “swims” through extraterrestrial sand opens up safer paths for exploring the Red Planet.
In short, the sands of the Sahara are paving our way to Mars!
👉 Read the full technical deep dives in the current issue of c’t magazine and online at heise.de!