In October 2023 we were able to present a VR demo of our VTB at the fall synergy meeting of the DLR Explorer initiatives. This was a complete success, as there was a lot of interest and positive feedback. The demo included our Mars surface based on HiRISE data, natural phenomena such as sandstorms, VR locomotion and interaction, as well as the latest versions of the swarm members exploring the environment.
From 29.08. – 31.08. an internal RGE working meeting took place at the University of Bremen. Participants were members of the working group for Cognitive Neuroinformatics, the working group for High-Performance Visualization and DFKI. At times, Andre and Roland from the Computer Graphics and Virtual Reality working group were also present. Together, we clarified many questions on key areas such as SLAM, trajectory planning, VTB connection, mission control and the network architecture.
We see the first deployment of two ubiquity access points as a special milestone. This enabled us to send the first ROS2 messages via a network between the two access points.
Other highlights included a visit to the “MARS findet Stadt” exhibition at the Kulturkirche St. Stephani and dinner at the Pannekoekschip Admiral Nelson.
We recently managed to integrate ROS2 communication into the UE5-based virtual testbed. This was achieved using and extending the rclUE plugin. ROS2 greatly improves the ability of efficient, decentral communication between all agents of our eventually developed autonomous swarm.
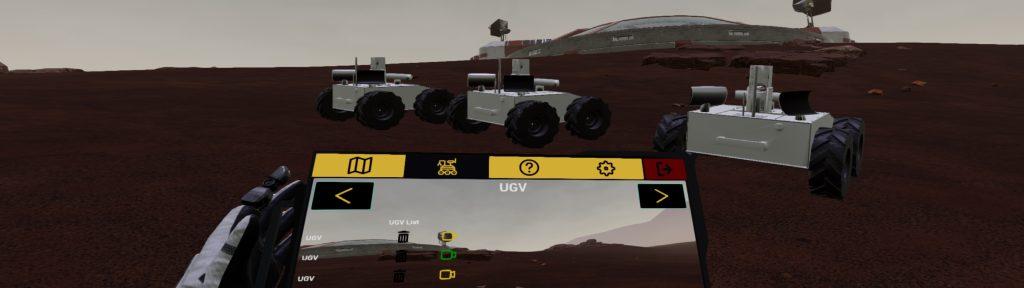
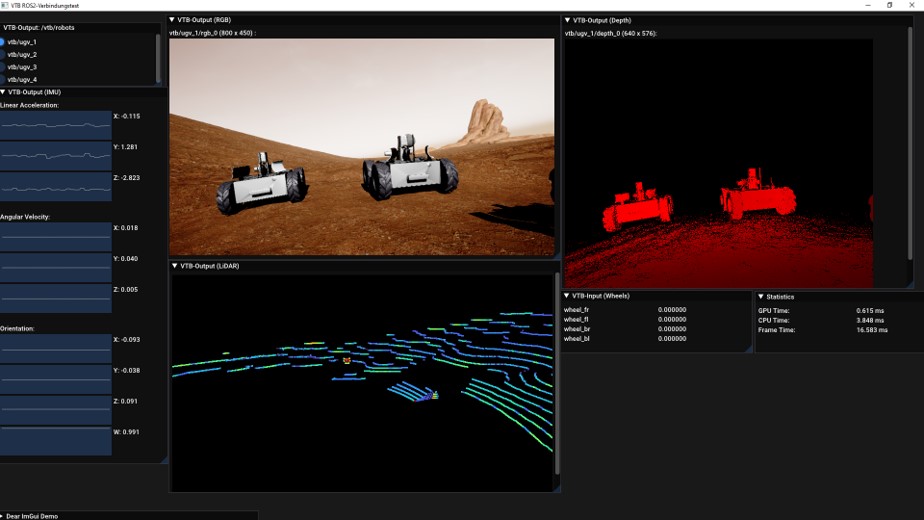
Moreover, we developed and integrated the first swarm unit, a rover, including simulations of various sensors. Specifically, RGB and depth cameras, a Lidar sensor, and an IMU. The collision and friction with the Mars terrain are simulated, too, using the physics engine of the UE5. Although the simulations are rather simple for now, they will be extended incrementally over time.
In order to test the ROS2 communication, we also developed a small external testing application, with which steering commands can be sent to the simulated rover and which shows the sensor output.
On February 16 and 17 the second SPEC meeting of VaMEx3 took place at the University of the Bundeswehr Munich. In total about 20 people participated in the meeting. Michael Schleiss presented a rough mission concept on Mars. The vision is to cover an area of approx. 14km x 14km on Mars to explore and map as well as to perform in smaller regions of interest such as drilling and sampling. to be carried out.
The key outcome of the SPEC meeting is a rough schedule of the VaMEx3 final presentation. Responsible project participants were also assigned to the major hardware and software components so that everyone should know what to do next. Furthermore, the project partners from Anavs, Aerospace Information Technology – University of Würzburg and TUM presented their swarm participants. In addition, the VaMEx3 Virtual Test Bed (VTB) was presented, which will be used to simulate the Mars mission. The VTB combines Unreal Engine 5 and ROS2 communication. In the near future, each project partner has to define requirements for the VTB in order to implement a simulation as realistic as possible.
Another important point was the presentation of possible test areas for the VaMEx3 demonstration. Volker Klein presented different areas in Germany, whereby these should have good accessibility and infrastructure. The focus is on regions of open pit coal mining due to the similarity to the surface of Mars. By fall 2023, further information will be obtained for the regions Garzweiler, Groitscher Dreieck, Lausitz and Eifel.
During November, the first prototype of the new Unreal Engine 5-based Virtual Testbed was completed. This now uses the advanced lighting and rendering methods from the current Unreal Engine version (especially Nanite and Lumen) and thus offers a significantly higher graphics quality.
To allow multiple users to explore the testbed together, the first elements of a session-based multi-user system have been integrated: Users can choose a name at program start and then either start their own session or join an existing one by entering IP and port.
Furthermore, first landscapes from the existing virtual testbed were ported to the new one and adapted for the use of Unreal’s level streaming system. This allows to dynamically load (only) the areas of the level that are currently visible. Ultimately, larger worlds can be rendered in a performant way.