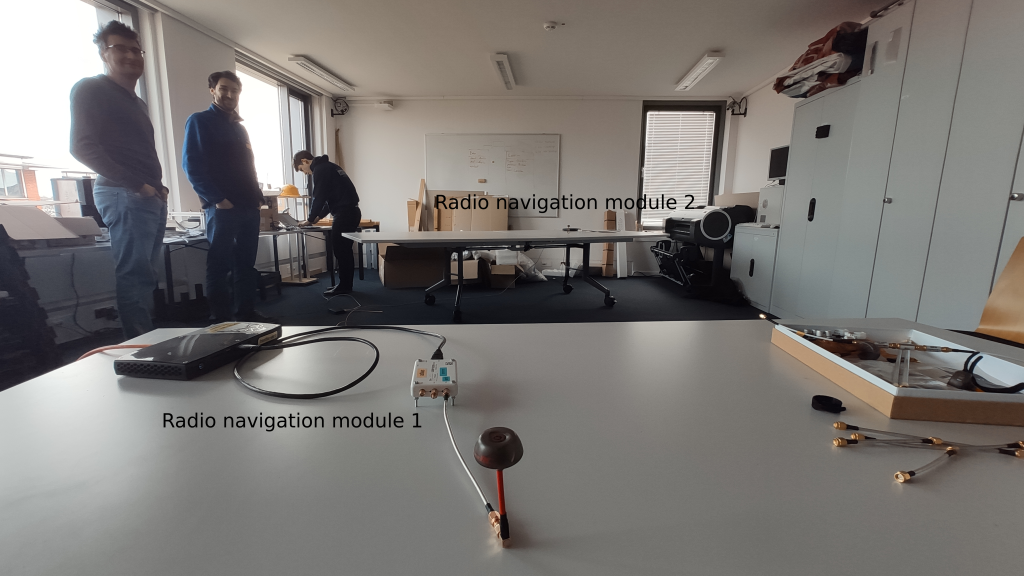
In late February, the DLR-Kommunikation und Navigation and Cognitive Neuroinformatics group (CNI) performed integration tests concerning the radio navigation and RTK setup in preparation of the VaMEx3 field tests. We conducted tests at CNI in Bremen, using two radio navigation modules comprising a USRP, a Nuc Computer, and a radio antenna. These modules transfer ranging measurements between each others and will eventually be integrated onto the Robotnik Summit XL rovers. During the upcoming field tests additional seven payload boxes will be deployed, each equipped with the radio navigation module. Through exchange of ranging information a successful navigation will be performed as well as positioning of the rovers will be robustified.
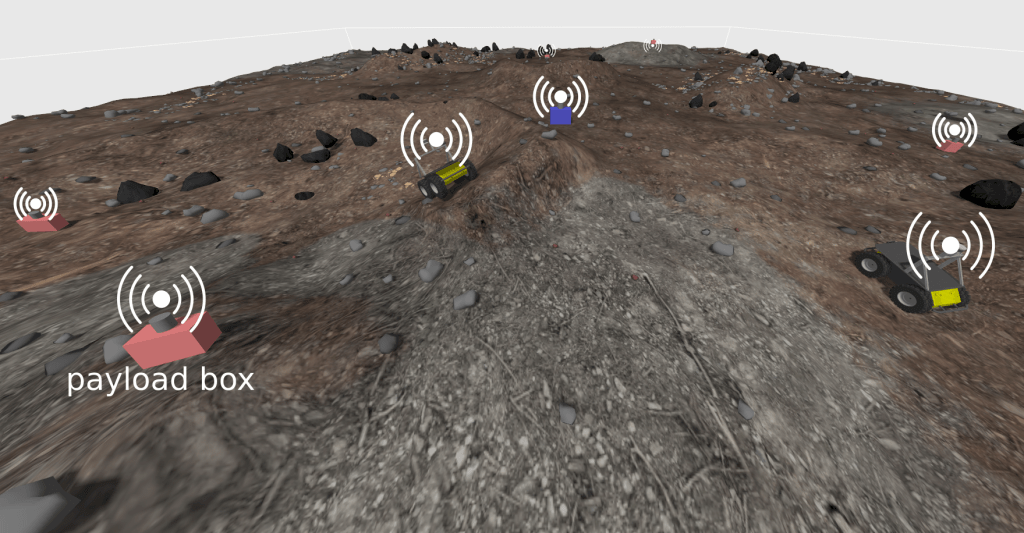
Moreover, the multi-robot graph simulation in Gazebo Fortress was extended to assess the radio navigation outside of field tests. We designed a preliminary model of the payload boxes, which is able to publish its pose in Gazebo. A ROS2 node receiving the position information via the Gazebo ROS bridge, computes ranges between the payload boxes, and publishes them. These ranging measurements can enhance SLAM and positioning robustness for the multi-robot graph SLAM or other algorithms. We plan to implement the interfaces for the multi-robot operations in the near future.
Lastly, we tested the GNSS Real-Time Kinematic (RTK) setup of the DLR-KN. We used the RTK corrections with the ZED-F9P and a Moasic H5 receiver. The receivers correctly utilized the corrections, resulting in a reported accuracy of approximately 1cm.
