In October 2023 we were able to present a VR demo of our VTB at the fall synergy meeting of the DLR Explorer initiatives. This was a complete success, as there was a lot of interest and positive feedback. The demo included our Mars surface based on HiRISE data, natural phenomena such as sandstorms, VR locomotion and interaction, as well as the latest versions of the swarm members exploring the environment.
We recently managed to integrate ROS2 communication into the UE5-based virtual testbed. This was achieved using and extending the rclUE plugin. ROS2 greatly improves the ability of efficient, decentral communication between all agents of our eventually developed autonomous swarm.
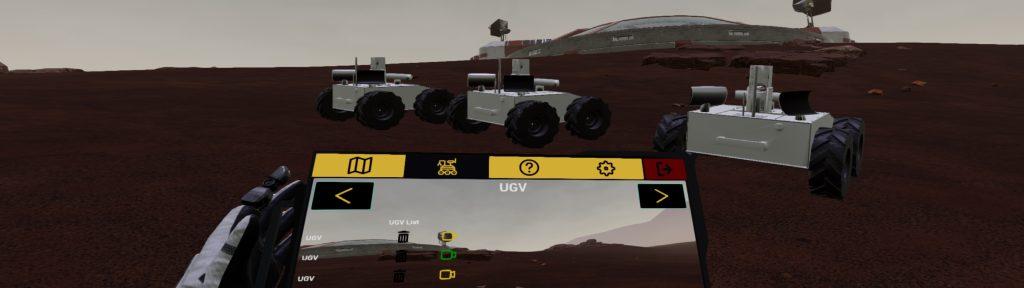
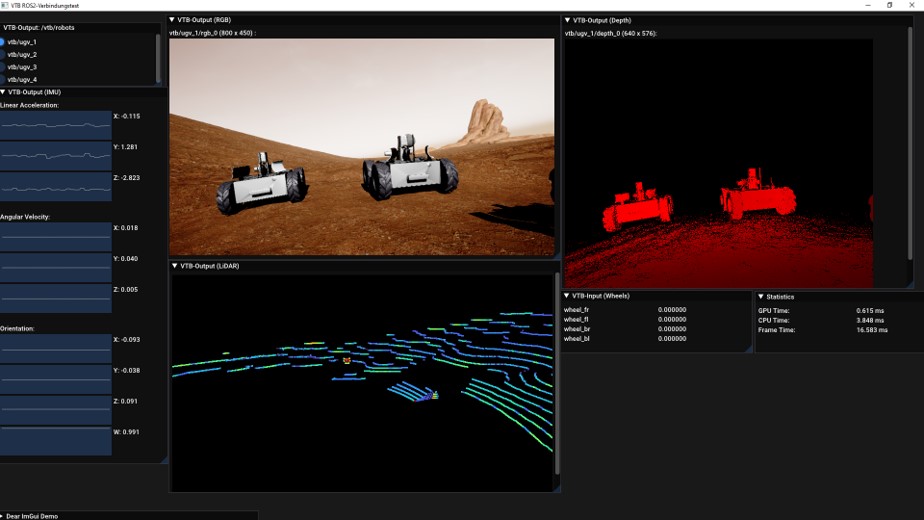
Moreover, we developed and integrated the first swarm unit, a rover, including simulations of various sensors. Specifically, RGB and depth cameras, a Lidar sensor, and an IMU. The collision and friction with the Mars terrain are simulated, too, using the physics engine of the UE5. Although the simulations are rather simple for now, they will be extended incrementally over time.
In order to test the ROS2 communication, we also developed a small external testing application, with which steering commands can be sent to the simulated rover and which shows the sensor output.
During November, the first prototype of the new Unreal Engine 5-based Virtual Testbed was completed. This now uses the advanced lighting and rendering methods from the current Unreal Engine version (especially Nanite and Lumen) and thus offers a significantly higher graphics quality.
To allow multiple users to explore the testbed together, the first elements of a session-based multi-user system have been integrated: Users can choose a name at program start and then either start their own session or join an existing one by entering IP and port.
Furthermore, first landscapes from the existing virtual testbed were ported to the new one and adapted for the use of Unreal’s level streaming system. This allows to dynamically load (only) the areas of the level that are currently visible. Ultimately, larger worlds can be rendered in a performant way.